Servo motor, hay còn gọi là động cơ servo, là một trong những thiết bị truyền động thông minh quan trọng nhất trong tự động hóa công nghiệp và robot. Hiểu rõ nguyên lý servo motor không chỉ giúp kỹ sư lựa chọn đúng thiết bị mà còn tối ưu hóa hiệu suất hệ thống. Bài viết này phân tích chi tiết từ cấu tạo, cơ chế hoạt động vòng kín, các loại servo cho đến ứng dụng thực tế, sai lầm phổ biến và câu trả lời cho những thắc mắc thường gặp.
Servo motor là một động cơ điện kết hợp với hệ thống điều khiển vòng kín (closed-loop). Bản chất khác biệt so với động cơ thông thường nằm ở khả năng kiểm soát chính xác vị trí, tốc độ và mô-men xoắn nhờ tín hiệu phản hồi từ encoder hoặc resolver. Mục tiêu của servo motor là thực hiện lệnh đặt ra với sai số cực thấp, thường dưới 0,01 độ đối với vị trí góc hoặc dưới 0,1% đối với tốc độ.
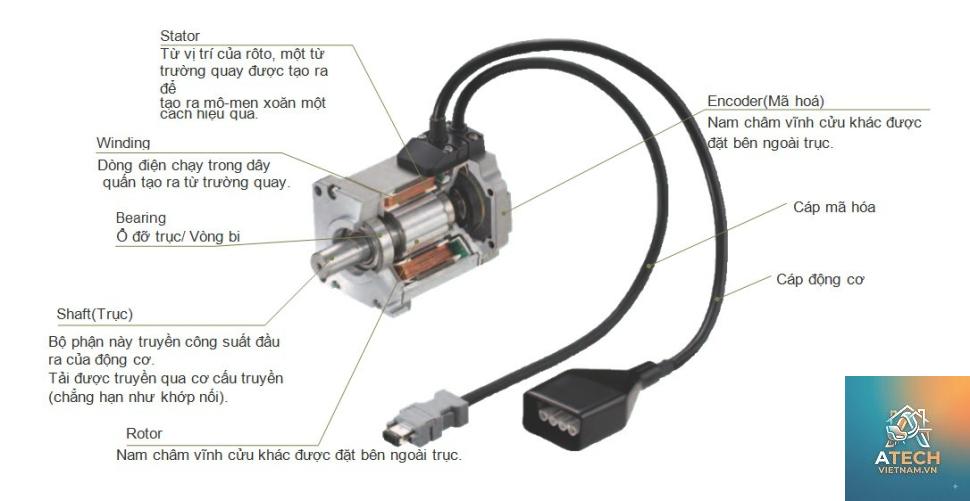
Mỗi servo motor trong thực tế là một hệ thống gồm ba thành phần chính: động cơ điện (AC hoặc DC), cảm biến vị trí/tốc độ (encoder) và bộ điều khiển servo (servo drive). Nguyên lý servo motor hoạt động dựa trên việc so sánh liên tục giữa giá trị đặt (setpoint) và giá trị thực tế (feedback) để điều chỉnh dòng điện cấp vào động cơ, từ đó duy trì trạng thái đúng với yêu cầu.
Cấu tạo của servo motor: Những bộ phận quyết định độ chính xác
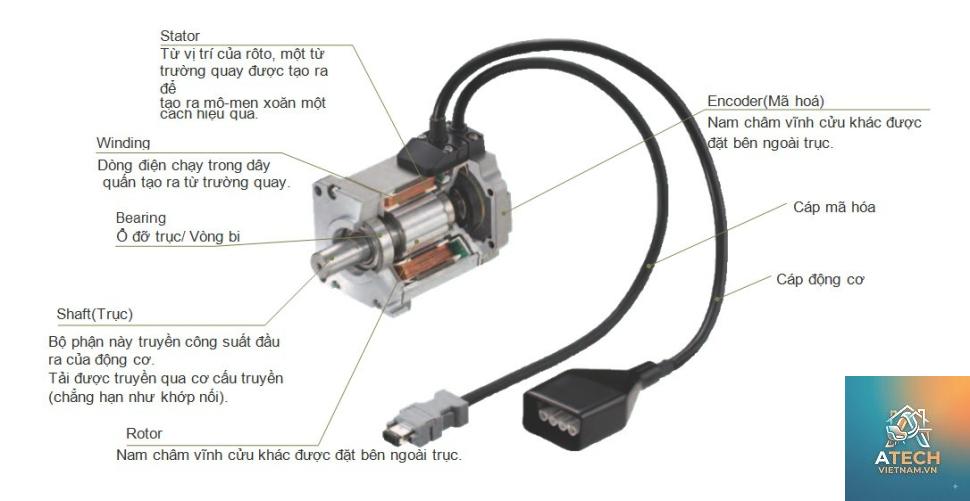
Động cơ
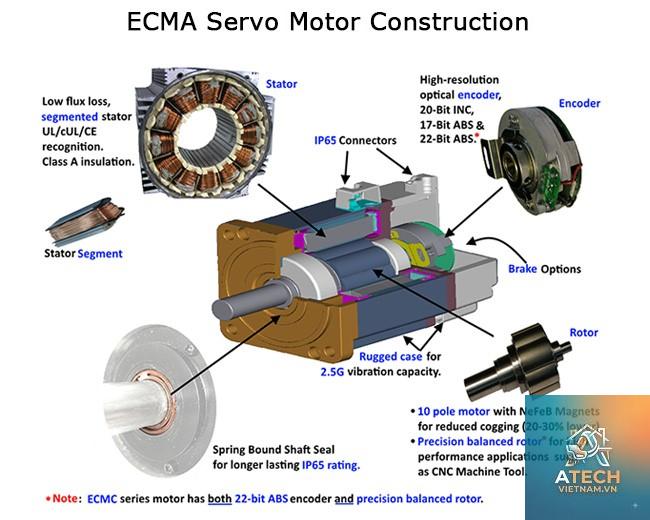
Động cơ trong servo có thể là DC (dùng chổi than) hoặc AC (không chổi than – BLAC). Servo AC hiện đại chiếm ưu thế nhờ hiệu suất cao, tuổi thọ lớn và khả năng chịu quá tải tốt. Động cơ DC thường xuất hiện trong các ứng dụng nhỏ, chi phí thấp. Phần stato có cuộn dây, phần roto gắn nam châm vĩnh cửu hoặc lồng sóc tùy loại.
Encoder (Cảm biến phản hồi)
Encoder là thành phần sống còn của nguyên lý servo motor. Nó đo vị trí góc tuyệt đối hoặc tương đối và chuyển thành tín hiệu điện (xung hoặc giao thức kỹ thuật số). Có hai loại phổ biến: encoder tăng dần (incremental) cấp xung A, B, Z và encoder tuyệt đối (absolute) cho biết vị trí chính xác ngay khi khởi động. Độ phân giải encoder càng cao, servo càng mượt. Các hãng như Panasonic, Mitsubishi, Siemens thường dùng encoder 17-bit, 20-bit hay 23-bit.
Bộ drive nhận tín hiệu điều khiển từ PLC hoặc CNC, so sánh với tín hiệu phản hồi, thực hiện thuật toán PID (Proportional-Integral-Derivative) để điều chỉnh dòng điện ba pha. Drive cũng chịu trách nhiệm giới hạn dòng, chẩn đoán lỗi và giao tiếp qua các chuẩn như Pulse/Direction, EtherCAT, CANopen, Modbus.
Nguyên lý hoạt động chi tiết của servo motor
Vòng điều khiển vị trí, tốc độ và dòng điện
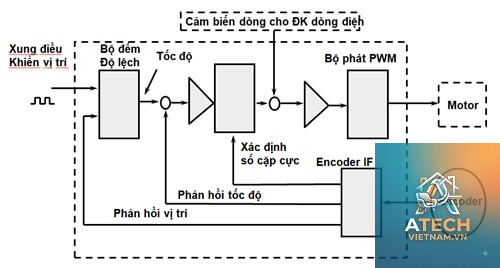
Nguyên lý servo motor dựa trên ba vòng điều khiển lồng nhau. Vòng trong cùng là vòng dòng điện (current loop), kiểm soát dòng cấp cho cuộn dây. Vòng giữa là vòng tốc độ (speed loop), điều chỉnh RPM của động cơ. Vòng ngoài là vòng vị trí (position loop), đảm bảo góc quay hoặc tịnh tiến đúng với lệnh. Tốc độ xử lý của ba vòng này khác nhau: vòng dòng cập nhật vài chục micro-giây, vòng tốc độ vài trăm micro-giây, vòng vị trí vài mili-giây.
Giải thích cụ thể: Khi PLC gửi một lệnh vị trí, drive tính toán sai số (error) giữa vị trí yêu cầu và vị trí thực từ encoder. Sai số này đi qua khâu PID tạo ra tín hiệu tốc độ tham chiếu. Tín hiệu tốc độ tiếp tục so sánh với tốc độ thực, qua PID thứ hai sinh ra tín hiệu dòng điện tham chiếu. Cuối cùng, dòng điện thực được điều chế PWM (xung điện áp) để kích hoạt các transistor IGBT, làm quay động cơ.
Thuật toán PID trong servo
Bộ điều khiển PID là trái tim của nguyên lý servo motor. Hệ số Kp (proportional) quyết định phản ứng nhanh với sai số, Ki (integral) triệt tiêu sai số ổn định, Kd (derivative) giảm overshoot và dao động. Trong thực tế, các drive hiện đại có chức năng auto-tuning để tự động điều chỉnh PID dựa trên quán tính tải và ma sát. Một servo được tinh chỉnh tốt có thể đạt thời gian đáp ứng dưới 5 ms cho lệnh bước nhảy 1000 xung.
Điều khiển torque (mô-men) – khi lực là ưu tiên
Ngoài vị trí và tốc độ, nguyên lý servo motor còn cho phép điều khiển mô-men xoắn trực tiếp. Thay vì điều khiển vị trí, drive đặt dòng điện tỷ lệ với moment mong muốn. Ứng dụng điển hình là các máy cuốn, máy quấn dây, nơi cần lực căng không đổi dù tốc độ thay đổi. Servo torque mode thường kết hợp với cảm biến lực hoặc bộ điều chỉnh căng riêng.
Phân loại servo motor phổ biến
Tiêu chí
Servo AC (BLAC)
Servo DC (Brushed/ Brushless)
Nguồn điện
Xoay chiều 1/3 pha, chỉnh lưu thành DC
Một chiều trực tiếp
Kết cấu stato/roto
Stato có cuộn dây, roto nam châm vĩnh cửu
Brushed: stato nam châm, roto cuộn dây+chổi than. Brushless: ngược lại
Bảo trì
Không chổi than, tuổi thọ dài
Brushed cần thay chổi định kỳ
Hiệu suất
Cao, thường >85%
Thấp hơn (70-80%)
Đỉnh mô-men so với liên tục
Có thể đạt 300-400% trong vài giây
Brushed thường không quá 200%
Ứng dụng chính
Công nghiệp: robot, máy CNC, đóng gói, dệt
Thiết bị nhỏ: mô hình, máy in 3D, thiết bị y tế
Chi phí
Trung bình đến cao
Brushed rẻ, Brushless trung bình
Servo AC không đồng bộ (induction) cũng tồn tại nhưng giảm dần do hiệu suất thấp và đáp ứng chậm. Ngày nay, servo đồng bộ nam châm vĩnh cửu (PMSM) chiếm phần lớn thị trường.
Độ chính xác cực cao, sai số vị trí có thể dưới 1/1000 vòng.
Đáp ứng động nhanh, thường đạt thời gian tăng tốc từ 0 đến 3000 v/p trong 20-40 ms.
Dải tốc độ rộng, từ 1 v/p đến 6000 v/p tùy loại.
Mô-men xoắn gần như không đổi trong dải tốc độ định mức.
Khả năng giữ vị trí khi dừng điện (holding torque) nhờ encoder và dòng duy trì.
Giám sát và chẩn đoán lỗi thông minh qua drive.
Hạn chế
Giá thành cao hơn so với động cơ bước (stepper motor) cùng công suất.
Yêu cầu bộ drive và hệ thống điều khiển phức tạp.
Nhạy cảm với nhiễu điện từ, cần dây phản hồi được bảo vệ.
Cần kỹ thuật viên có chuyên môn để tinh chỉnh PID và cài đặt thông số.
Tiêu thụ điện năng ở chế độ dừng (holding current) nếu không có brake.
So sánh servo motor với động cơ bước (Stepper Motor)
Tính năng
Servo motor
Stepper motor
Vòng điều khiển
Kín (có phản hồi)
Hở (không phản hồi) hoặc kín có encoder
Độ chính xác diễn ra
Cao, không mất bước
Có thể mất bước nếu quá tải hoặc cộng hưởng
Hiệu suất năng lượng
Cao, giảm dòng khi không tải
Luôn tiêu thụ dòng tối đa, nóng hơn
Đáp ứng tốc độ
Cao, duy trì mô-men đến tốc độ định mức
Mô-men giảm mạnh ở tốc độ cao
Tiếng ồn và rung
Êm, ít rung
Có thể rung động ở dải tần thấp
Chi phí
Cao hơn
Thấp hơn
Ứng dụng phổ biến
Robot, CNC, máy đóng gói, máy dệt
Máy in 3D, máy khâu, máy CNC nhỏ, thiết bị định vị
Trong thực tế, việc chọn servo hay stepper phụ thuộc vào yêu cầu về độ chính xác, tốc độ và tải. Với tải có moment quán tính lớn hoặc cần khả năng giữ vị trí khi mất điện, servo có phanh hãm là lựa chọn an toàn.
Ứng dụng thực tế của nguyên lý servo motor trong công nghiệp
Robot công nghiệp và collaborative robot
Hầu hết robot 6 trục đều sử dụng servo motor cho mỗi khớp. Nguyên lý servo motor cho phép các khớp di chuyển đồng thời với độ chính xác sub-millimet trong các tác vụ hàn, lắp ráp, sơn. Collaborative robot (cobot) dùng servo có cảm biến mô-men để phát hiện va chạm và dừng khẩn cấp.
Máy CNC (Computer Numerical Control)
Các trục X, Y, Z và trục quay trong máy phay, tiện, cắt laser đều dùng servo. Với encoder có độ phân giải 1µm, máy CNC có thể gia công chi tiết có dung sai ±0,01 mm. Servo drive cũng hỗ trợ các chức năng như speed override, feed-forward để bù trễ.
Máy đóng gói tự động
Các máy chiết rót, đóng nắp, dán nhãn và xếp thùng. Servo motor điều khiển đồng bộ nhiều trục thông qua giao tiếp EtherCAT, đảm bảo chu kỳ đóng gói đạt 300-600 sản phẩm/phút mà không lỗi vị trí.
Ngành sản xuất linh kiện điện tử
Máy pick-and-place cho PCB, máy hàn chảy (reflow), máy in lụa đều dùng servo với độ chính xác vị trí cực cao, encoder có thể tới 24-bit. Mỗi chu kỳ đặt linh kiện có độ lặp lại dưới 20 µm.
Hệ thống quấn dây, cán thép và in ấn
Các ứng dụng yêu cầu điều khiển lực căng (tension control). Servo torque mode kết hợp với load cell giúp duy trì lực căng không đổi, tránh đứt hoặc nhăn vật liệu.
Sai lầm thường gặp khi sử dụng và cách khắc phục
Chọn encoder không phù hợp: Dùng encoder tăng dần cho các hệ thống cần reset vị trí sau mỗi lần khởi động. Cách khắc phục: chọn encoder tuyệt đối (absolute) để không mất điểm gốc.
Tinh chỉnh PID sai: Kp quá cao gây dao động và overshoot. Ki quá thấp gây sai số ổn định. Nên dùng auto-tuning hoặc đo đặc tính cơ học thực tế.
Không tính đến quán tính tải (load inertia ratio): Tỉ lệ quán tính tải/quán tính rotor vượt quá 10:1 khiến servo mất ổn định. Cần dùng bộ giảm tốc hoặc servo có rotor đĩa lớn.
Bỏ qua nhiễu điện từ: Dây encoder chạy chung với dây động lực gây mất xung. Bắt buộc dây dùng loại bọc chống nhiễu và nối đất đúng.
Không lắp phanh hãm (brake) khi cần: Trục đứng (vertical) không có phanh sẽ rơi khi mất điện. Chọn servo có brake tích hợp hoặc lắp phanh ngoài.
Cài đặt độ phân giải xung quá cao so với tần số drive: Drive có tần số đầu vào xung tối đa 500 kHz. Nếu yêu cầu 1 triệu xung/rev thì tốc độ quay tối đa chỉ 30 v/p. Cần cân bằng.
Đầu tiên, cần xác định đúng moment tải liên tục và đỉnh để chọn servo phù hợp. Servo thường có dòng đỉnh gấp 3-4 lần dòng định mức nhưng chỉ chịu được trong vài giây. Nếu tải có quán tính cao, cần thêm hộp giảm tốc để tăng moment và giảm inertia ratio.
Thứ hai, cài đặt thông số drive bao gồm giới hạn dòng, giới hạn moment, vòng lọc, gia tốc tối đa. Nhiều kỹ sư mới hay quên không set travel limit (giới hạn hành trình), dẫn đến servo chạy quá giới hạn cơ khí gây hư hỏng.
Thứ ba, nhiệt độ môi trường cần duy trì dưới 45°C cho hầu hết servo. Lắp đặt quạt tản nhiệt cho drive nếu tủ điện kín. Và quan trọng nhất, phải sử dụng nguồn điện ổn định, có bộ lọc RFI để tránh hỏng drive.
Câu hỏi thường gặp
Servo motor có thể chạy không cần encoder không?
Không. Nguyên lý servo motor bắt buộc có vòng phản hồi vị trí. Nếu thiếu encoder, động cơ chỉ hoạt động như động cơ AC thường, không thể điều khiển chính xác vị trí. Một số servo có thể chạy sensorless ở dải tốc độ cao nhưng không áp dụng cho vị trí.
Độ phân giải encoder ảnh hưởng thế nào đến độ chính xác?
Độ phân giải cao hơn cho phép vòng điều khiển nhận biết sai số nhỏ hơn, từ đó điều chỉnh mượt hơn. Ví dụ encoder 17-bit cho 131072 xung/vòng, với vít me bước 5mm thì mỗi xung tương ứng 0,038 µm. Tuy nhiên, độ phân giải quá cao có thể gây nhiễu nếu tần số xử lý không đủ.
Tại sao servo motor bị kêu hoặc rung?
Nguyên nhân thường do PID chưa tốt: Kp quá cao, Ki quá thấp, hoặc inertia ratio cao dẫn đến cộng hưởng. Có thể do lắp đặt không chắc chắn, hoặc dây encoder bị nhiễu. Thử giảm gain vị trí hoặc tăng thời gian lọc.
Có thể thay thế servo motor bằng stepper motor không?
Có thể nếu ứng dụng không yêu cầu độ chính xác và tốc độ cao. Ví dụ máy in 3D thường dùng stepper. Nhưng nếu cần giữ tải, chạy tốc độ trên 1000 v/p hoặc có tải thay đổi, servo là lựa chọn bắt buộc.
Tuổi thọ trung bình của servo motor là bao lâu?
Servo AC không chổi than có tuổi thọ khoảng 20000-40000 giờ ở tải định mức, phụ thuộc vào vòng bi và encoder. Servo DC có chổi than thường thấp hơn (5000-10000 giờ) vì chổi mòn. Bảo trì định kỳ thay vòng bi và kiểm tra encoder giúp kéo dài tuổi thọ.
Kết luận
Nguyên lý servo motor là nền tảng của hầu hết các hệ thống chuyển động chính xác trong công nghiệp hiện đại. Nắm vững nguyên lý hoạt động, cấu tạo, các vòng điều khiển, thuật toán PID và cách chọn loại servo phù hợp giúp tối ưu hiệu suất máy móc, giảm thời gian lỗi và tăng năng suất. Khi đầu tư vào servo, cần chú ý đến tỉ lệ quán tính, chất lượng tín hiệu phản hồi, khả năng tản nhiệt và kỹ năng tinh chỉnh. Một hệ thống servo được lựa chọn và cài đặt đúng cách sẽ vận hành êm ái, bền bỉ và đáp ứng yêu cầu khắt khe của sản xuất.