Motor brushless (BLDC) ngày càng phổ biến trong các ứng dụng từ drone, xe điện, robot cho đến máy công nghiệp. Tuy nhiên, việc đấu dây không đúng cách có thể khiến động cơ không hoạt động, rung giật hoặc cháy ESC. Bài viết này sẽ hướng dẫn bạn cách đấu dây motor brushless một cách chính xác, giải thích nguyên lý, các kiểu đấu phổ biến và những lưu ý quan trọng để đảm bảo thiết bị vận hành ổn định.
Cách đấu dây motor brushless là gì? Bản chất và nguyên lý cơ bản
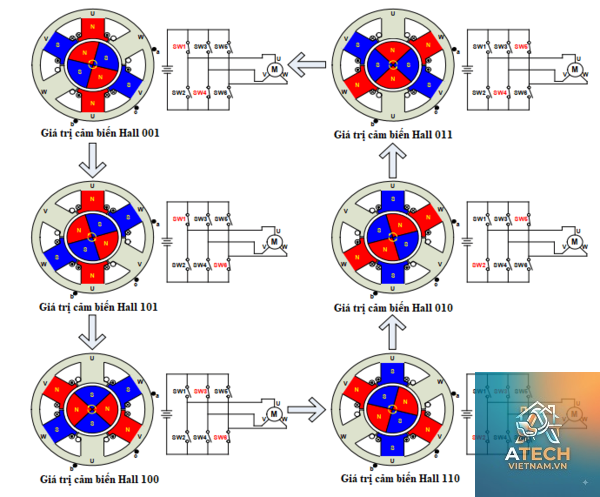
Motor brushless (động cơ không chổi than) khác với động cơ DC truyền thống ở chỗ không có chổi than và cổ góp. Thay vào đó, rotor là nam châm vĩnh cửu, stator là các cuộn dây điện từ. Để rotor quay, cần phải cấp dòng điện xoay chiều ba pha vào các cuộn dây stator theo một thứ tự nhất định. Việc này được thực hiện bởi ESC (Electronic Speed Controller).
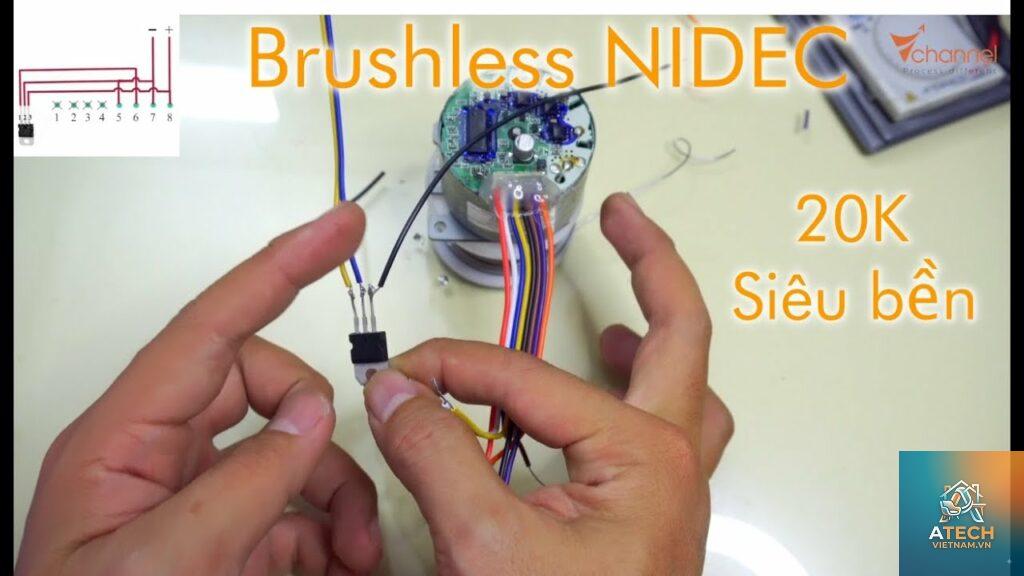
Vậy cách đấu dây motor brushless thực chất là kết nối ba dây pha từ động cơ (thường có màu: vàng, xanh lá, xanh dương – hoặc đen, trắng, đỏ) với ba đầu ra pha tương ứng trên ESC. Ngoài ra, nếu động cơ có Hall sensor (cảm biến vị trí từ), sẽ có thêm 5 dây tín hiệu cần kết nối chính xác.
Dây pha (3 dây): Thường ký hiệu A, B, C hoặc U, V, W. Chúng dẫn dòng điện xoay chiều ba pha từ ESC.
Dây Hall sensor (5 dây): Gồm VCC (+5V), GND, và 3 dây tín hiệu Hall (H1, H2, H3). Chỉ có ở động cơ có cảm biến vị trí.
Dây nhiệt (tùy chọn): Một số động cơ có thêm cảm biến nhiệt (NTC) để bảo vệ quá nhiệt.
Phân loại motor brushless dựa trên kết cấu cuộn dây và cách đấu tương ứng
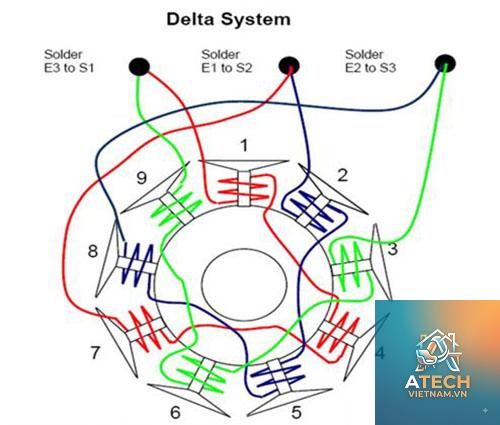
Có hai kiểu quấn dây chính ảnh hưởng trực tiếp đến cách đấu dây motor brushless: đấu hình sao (Star/Wye) và đấu hình tam giác (Delta). Mỗi loại có đặc tính điện khác nhau.
Kiểu đấu
Đặc điểm
Dòng điện
Mô-men xoắn
Ứng dụng
Hình sao (Star)
Điểm trung tâm chung, dây pha nối với ba đầu cuộn
Thấp hơn
Cao hơn ở tốc độ thấp
Drone, xe điện cần mô-men khởi động lớn
Hình tam giác (Delta)
Các cuộn nối tiếp nhau tạo vòng kín
Cao hơn
Thấp hơn nhưng đạt tốc độ cao
Máy bay mô hình, máy bơm
Cách đấu dây motor brushless thực tế không thay đổi hình dạng vật lý của cuộn dây – nó được quấn cố định. Tuy nhiên, bạn cần hiểu rõ ESC và động cơ của mình được thiết kế cho kiểu đấu nào. Hầu hết motor brushless hiện nay sử dụng đấu hình sao vì dễ điều khiển và ít nhiễu.
Hướng dẫn chi tiết cách đấu dây motor brushless với ESC
Bước 1: Xác định loại động cơ và ESC
Đọc thông số kỹ thuật: điện áp (VDC), dòng tối đa (A), số pole, kiểu quấn (Star/Delta), có Hall hay không. ESC phải tương thích về dòng và loại tín hiệu (PWM).
Bước 2: Kết nối dây pha
Động cơ 3 dây: Nối ba dây pha của motor vào ba đầu pha của ESC. Thứ tự ban đầu có thể bất kỳ – ESC sẽ tự động hiệu chỉnh nếu hỗ trợ tính năng “auto-detect” hoặc bạn phải thử đổi dây để đạt chiều quay mong muốn.
Mẹo: Nếu motor quay sai chiều, bạn chỉ cần đổi vị trí hai dây bất kỳ (ví dụ: đổi dây A và B).
Bước 3: Kết nối dây Hall sensor (nếu có)
Đấu dây theo sơ đồ pinout của ESC và motor. Thông thường:
VCC (đỏ) → 5V trên ESC
GND (đen) → GND
H1, H2, H3 (trắng/vàng/xanh) → các chân tín hiệu Hall trên ESC
Sai thứ tự dây Hall sẽ khiến motor rung, không quay hoặc quay giật. Cần dùng datasheet để xác định đúng.
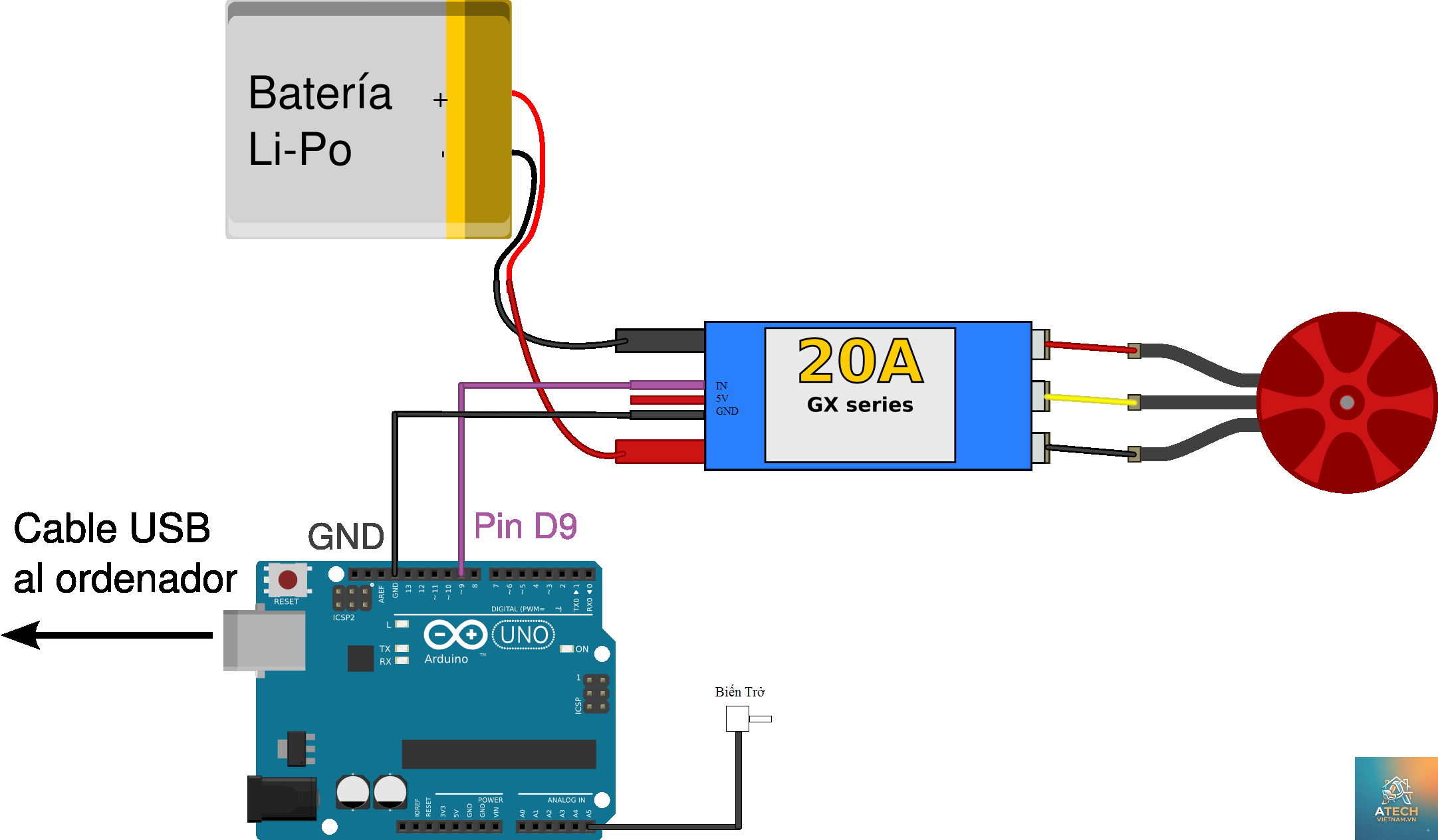
Bước 4: Cấp nguồn và kiểm tra
Kết nối pin với ESC, bật nguồn. ESC thường phát ra âm thanh báo hiệu. Dùng tay quay nhẹ rotor để cảm nhận độ trơn. Nếu motor kêu “beep” đều và không rung, đấu dây đã đúng.
So sánh: Đấu dây motor brushless có Hall sensor và không Hall
Tiêu chí
Có Hall sensor
Không Hall sensor (Sensorless)
Độ chính xác khởi động
Cao – biết vị trí rotor ngay
Thấp – cần Back EMF để ước lượng
Số dây cần đấu
8 dây (3 pha + 5 Hall)
3 dây pha
Khả năng chịu tải nặng
Tốt hơn ở tốc độ thấp
Kém hơn ở vòng quay chậm
Giá thành
Cao hơn
Thấp hơn
Ứng dụng
Robot, máy CNC, xe điện cao cấp
Drone, quạt, máy bơm
Cách đấu dây motor brushless có Hall sensor yêu cầu độ chính xác cao hơn vì phải kết nối đúng thứ tự các dây tín hiệu. Nếu đấu sai, motor sẽ không hoạt động hoặc hoạt động không ổn định.
Lợi ích và hạn chế của việc đấu dây motor brushless đúng kỹ thuật
Lợi ích
Động cơ vận hành êm, không rung, hiệu suất cao.
Tuổi thọ ESC và motor được kéo dài do dòng điện cân bằng.
Tránh hiện tượng cháy nổ do chập pha.
Đảo chiều quay dễ dàng bằng cách hoán đổi hai dây pha.
Hạn chế nếu đấu sai
Motor không quay hoặc quay giật.
ESC phát nhiệt quá mức, hư hỏng linh kiện.
Rotor bị kẹt, gây hỏng trục.
Hall sensor bị cháy nếu cấp sai điện áp.
Các sai lầm thường gặp khi thực hiện cách đấu dây motor brushless
Nhầm thứ tự dây pha khi không có cảm biến: Motor có thể quay nhưng không đúng chiều hoặc kêu to. Cách khắc phục: đổi hai dây bất kỳ.
Kết nối sai dây Hall: Motor rung lắc hoặc không khởi động. Cần kiểm tra lại sơ đồ chân – thường có thể dùng đồng hồ vạn năng đo thông mạch.
Cấp nguồn quá dòng cho ESC: Đấu dây không chặt, tiếp xúc kém gây phát nhiệt. Luôn dùng đầu nối phù hợp (bullet connector 3.5mm, 4mm, etc).
Bỏ qua tụ lọc nguồn: Nếu dây nguồn ESC dài, cần thêm tụ lọc để giảm nhiễu.
Không đồng bộ thông số: ESC đặt chế độ sensorless nhưng motor có Hall, hoặc ngược lại. Phải cấu hình firmware đúng.
Lưu ý quan trọng khi thực hiện cách đấu dây motor brushless
An toàn điện: Ngắt nguồn hoàn toàn trước khi đấu nối. Motor brushless có thể tạo ra điện áp ngược khi quay bằng tay.
Kiểm tra cách điện: Dùng đồng hồ vạn năng đo thông mạch giữa các dây pha với vỏ motor – không được có hiện tượng chạm vỏ.
Sử dụng đúng loại ESC: ESC phải hỗ trợ số pole và kiểu quấn của motor. Thông số thường ghi trên nhãn: “12N14P” (12 slot, 14 pole).
Cập nhật firmware: Một số ESC (BLHeli, SimonK, AM32) cho phép cấu hình chiều quay, timing, start-up power. Nên tinh chỉnh để motor hoạt động tối ưu.
Thử nghiệm tải nhẹ: Sau khi đấu xong, cho motor chạy không tải với tốc độ thấp (10-20% ga) để kiểm tra độ rung và âm thanh.
Ứng dụng thực tế của cách đấu dây motor brushless
Cách đấu dây motor brushless được áp dụng rộng rãi trong các lĩnh vực:
Drone FPV và camera: Motor 3 dây kết nối ESC 4-trong-1, yêu cầu đấu đúng thứ tự để bay ổn định.
Xe điện hoverboard, scooter: Motor có Hall sensor, đấu dây phức tạp hơn nhưng cần thiết cho khả năng leo dốc.
Robot và máy CNC: Dùng motor BLDC có encoder hoặc Hall để điều khiển vị trí chính xác.
Máy bơm nước, quạt công nghiệp: Sensorless, đấu 3 dây đơn giản, ESC tích hợp trong driver.
Câu hỏi thường gặp về cách đấu dây motor brushless
Có thể đấu trực tiếp motor brushless vào pin không?
Không. Motor brushless cần ESC để tạo ra dòng xoay chiều ba pha. Đấu thẳng vào nguồn DC sẽ làm cháy cuộn dây.
Làm sao để xác định dây pha nào là U, V, W?
Nếu không có tài liệu,
Nguyên nhân thường là do dây Hall đấu sai, hoặc ESC ở chế độ sensorless nhưng motor có Hall. Kiểm tra lại kết nối và cấu hình ESC. Cũng có thể do một pha bị đứt.
Có cần đấu dây Hall nếu ESC hỗ trợ sensorless?
Nếu ESC có cả 2 chế độ, bạn nên bỏ qua Hall và đấu 3 dây pha, cấu hình ESC sang sensorless. Nếu muốn dùng Hall, phải đấu đúng và cấu hình chế độ tương ứng.
Đổi dây pha có làm hỏng motor không?
Đổi 2 dây pha bất kỳ chỉ làm đảo chiều quay, không gây hại. Tuyệt đối không nối tắt 3 dây pha với nhau hoặc nối với GND.
Kết luận
Cách đấu dây motor brushless không quá phức tạp nếu nắm vững nguyên lý và làm đúng trình tự. Đối với động cơ không Hall, việc đấu chỉ gồm 3 dây pha và thử đổi thứ tự để có chiều quay mong muốn. Với động cơ có Hall sensor, cần thận trọng hơn vì có tới 8 dây. Luôn kiểm tra kỹ thông số kỹ thuật, sử dụng đồng hồ đo và thử nghiệm tải nhẹ trước khi vận hành chính thức. Thực hiện đúng cách đấu dây motor brushless sẽ giúp thiết bị hoạt động bền bỉ, hiệu quả và an toàn.