
Đảo chiều motor DC là một trong những kỹ năng nền tảng khi làm việc với động cơ điện một chiều. Có nhiều cách để thực hiện, từ sử dụng công tắc cơ khí đơn giản đến các mạch cầu H dùng MOSFET hoặc IC chuyên dụng. Bài viết này sẽ hướng dẫn chi tiết từng phương pháp, phân tích ưu nhược điểm và đưa ra các lưu ý quan trọng khi thiết kế mạch đảo chiều motor DC.
Nguyên lý cơ bản của đảo chiều motor DC
Motor DC hoạt động dựa trên nguyên tắc lực điện từ tác động lên rotor khi có dòng điện chạy qua cuộn dây. Chiều quay của motor phụ thuộc vào chiều dòng điện qua phần ứng. Khi đảo chiều dòng điện, từ trường tạo ra sẽ đổi hướng, làm motor quay ngược lại.
Về mặt lý thuyết, chỉ cần thay đổi cực tính điện áp đặt vào hai đầu motor là có thể đảo chiều. Tuy nhiên trong thực tế, việc đảo chiều motor DC cần được thực hiện an toàn, tránh hư hỏng nguồn và các linh kiện điều khiển.
Phân loại motor DC thường gặp
- Motor DC chổi than (Brushed DC Motor): dễ đảo chiều, chi phí thấp, được dùng nhiều trong đồ chơi, robot cỡ nhỏ.
- Motor DC không chổi than (Brushless DC Motor – BLDC): cần bộ điều khiển điện tử phức tạp hơn để đảo chiều.
- Motor DC giảm tốc (Gearmotor): có hộp số, khi đảo chiều cần chú ý đến quán tính của tải.
- Motor DC servo: kết hợp encoder và mạch điều khiển, đảo chiều thông qua tín hiệu PWM.
- Ưu điểm: không cần linh kiện điện tử, dễ lắp đặt.
- Nhược điểm: không thể điều khiển bằng vi điều khiển, không chịu được dòng lớn nếu dùng công tắc nhỏ.
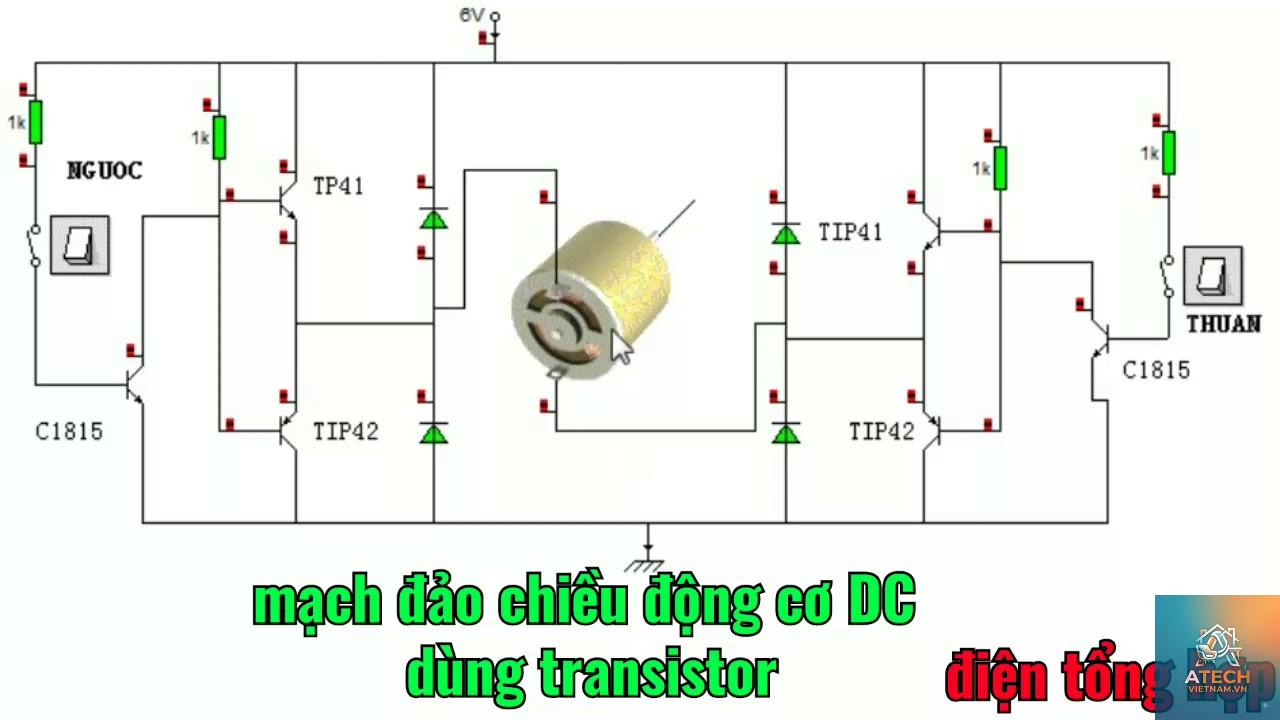
- Transistor lưỡng cực (BJT) như TIP120, BC547 cho dòng nhỏ.
- MOSFET kênh N và P hoặc N-N với driver cao áp.
- IC cầu H tích hợp sẵn: L298N, L293D, TB6612FNG, DRV8833.
- Có thể điều khiển tốc độ bằng PWM song song với đảo chiều.
- Hiệu suất cao (đặc biệt dùng MOSFET).
- Dễ dàng tích hợp với Arduino, Raspberry Pi.
- L298N: chịu dòng 2A mỗi kênh, có thể điều khiển 2 motor.
- L293D: dòng 600mA mỗi kênh, có diode bảo vệ tích hợp.
- DRV8833: dòng 1.2A mỗi kênh, hoạt động ở điện áp thấp, phù hợp pin.
- TB6612FNG: hiệu suất cao, chịu dòng 1.2A, rất phổ biến trong robot.
- Kết nối nguồn 12V vào module (Vcc và GND). Lưu ý nếu motor dùng dòng lớn, cần nguồn riêng, không cấp trực tiếp từ Arduino.
- Chân ENA (enable motor A) nối với chân PWM trên Arduino để điều khiển tốc độ.
- Chân IN1 và IN2 nối với hai chân digital để điều khiển chiều.
- Motor nối vào OUT1 và OUT2 của kênh A.
Bài viết tập trung vào motor DC chổi than – loại phổ biến nhất trong các ứng dụng DIY, công nghiệp nhỏ và dân dụng.
Các phương pháp đảo chiều motor DC phổ biến
1. Sử dụng công tắc DPDT (Double Pole Double Throw)
Công tắc DPDT có 2 bộ tiếp điểm và 2 vị trí chuyển mạch. Khi gạt về một phía, cực tính của nguồn được đảo ngược so với motor. Đây là cách đơn giản nhất nhưng chỉ phù hợp cho các ứng dụng vận hành bằng tay, không tự động hoá.
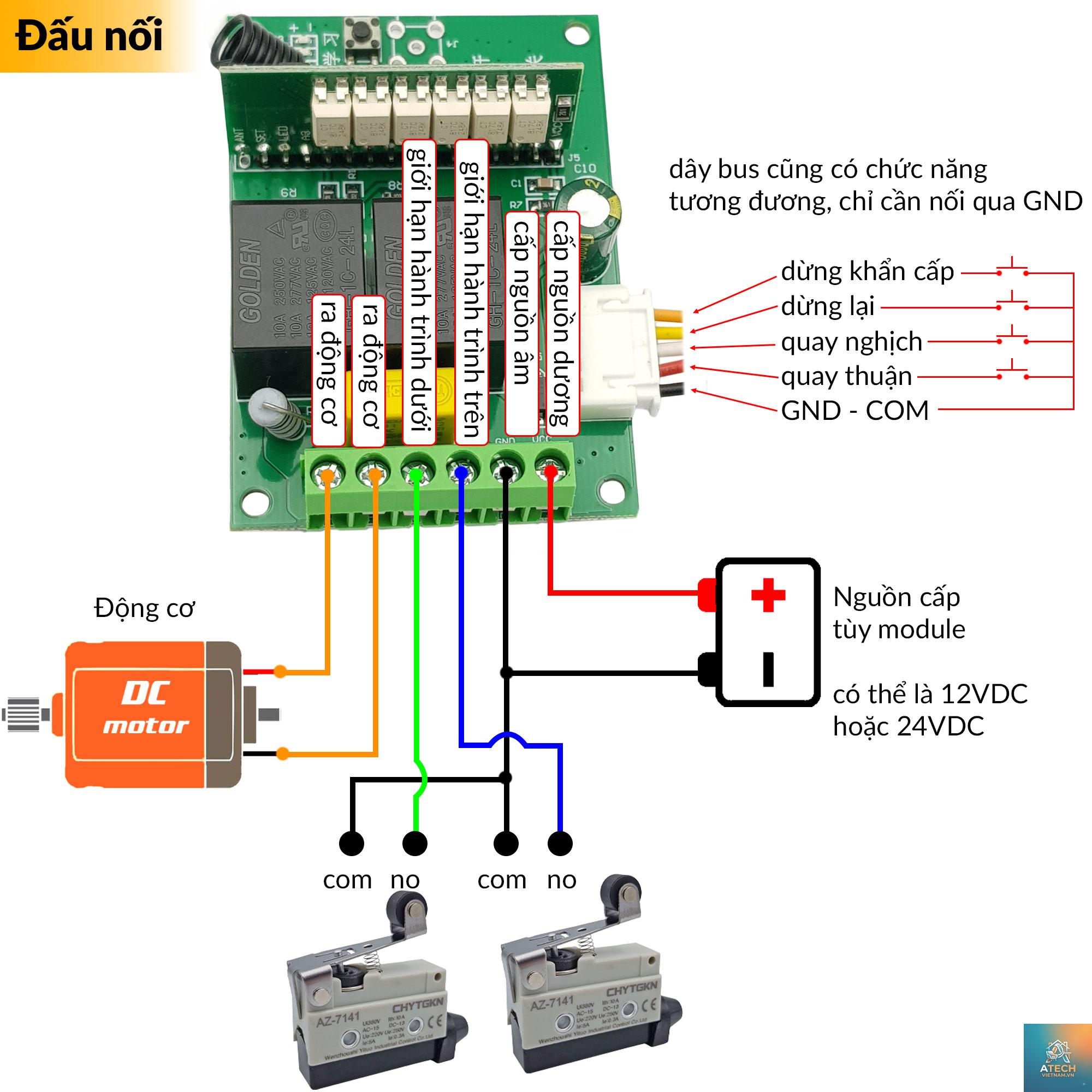
2. Mạch đảo chiều bằng relay (2 relay hoặc 1 relay DPDT)
Dùng hai relay thường mở hoặc một relay DPDT để chuyển đổi cực tính. Relay tác động bằng cuộn coil, cho phép điều khiển từ xa bằng tín hiệu điện 5V/12V hoặc từ vi điều khiển qua transistor.
| Thành phần | Chức năng |
|---|---|
| Relay 2 kênh (2 relay đơn) | Mỗi relay điều khiển một cực của motor, cần cẩn thận tránh short mạch khi cả hai relay cùng đóng. |
| Relay DPDT | Chuyển mạch hoàn toàn, an toàn hơn, chỉ cần 1 tín hiệu điều khiển. |
Lưu ý: khi dùng 2 relay riêng biệt, phải có bảo vệ chống chồng chéo (interlock) bằng phần cứng hoặc phần mềm để tránh ngắn mạch nguồn.
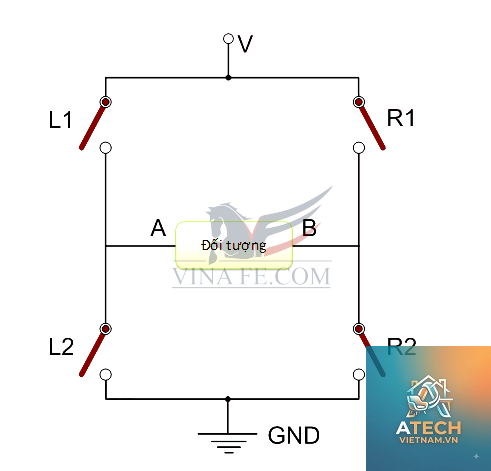
3. Mạch cầu H (H-Bridge) dùng transistor hoặc IC
Cầu H là giải pháp tối ưu nhất để đảo chiều motor DC. Gồm 4 công tắc (transistor, MOSFET hoặc IC) sắp xếp hình chữ H. Khi đóng cặp chéo Q1-Q4, motor quay thuận. Khi đóng cặp Q2-Q3, motor quay ngược.
Các linh kiện thường dùng:
Ưu điểm nổi bật:
4. Sử dụng IC driver chuyên dụng
Các IC driver tích hợp sẵn khả năng đảo chiều motor DC với dòng điện tương đối lớn, bảo vệ quá dòng, quá nhiệt. Ví dụ:
So sánh các phương pháp đảo chiều motor DC
| Phương pháp | Chi phí | Dòng điện tối đa | Điều khiển bằng vi điều khiển | Tốc độ (PWM) | Độ phức tạp |
|---|---|---|---|---|---|
| Công tắc DPDT | Thấp | Tùy công tắc (thường ≤10A) | Không | Không | Rất thấp |
| Relay | Trung bình | Cao (10-30A theo relay) | Có (cần driver) | Không (chỉ đóng/mở) | Trung bình |
| Cầu H BJT | Thấp | Thấp (vài trăm mA) | Có | Có | Trung bình |
| Cầu H MOSFET | Trung bình | Cao (vài chục A) | Có | Có | Cao (cần driver MOSFET) |
| IC driver | Trung bình-cao | Trung bình (1-2A) | Có (dùng trực tiếp) | Có | Thấp |
Hướng dẫn cách đảo chiều motor DC bằng mạch cầu H với IC L298N

L298N là module phổ biến, dễ sử dụng.
Sơ đồ kết nối
Bảng trạng thái đảo chiều
| IN1 | IN2 | EN (PWM) | Trạng thái motor |
|---|---|---|---|
| HIGH | LOW | PWM | Quay thuận (tốc độ theo PWM) |
| LOW | HIGH | PWM | Quay ngược |
| LOW | LOW | PWM | Dừng (freerun) |
| HIGH | HIGH | PWM | Hãm (brake) – motor dừng nhanh |
Code mẫu Arduino
Chương trình đơn giản đảo chiều motor DC sau mỗi 3 giây:
// Chân kết nối
#define IN1 8
#define IN2 9
#define ENA 5 void setup() { pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); pinMode(ENA, OUTPUT);
} void loop() { // Quay thuận với tốc độ 50% digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); analogWrite(ENA, 128); delay(3000); // Quay ngược với tốc độ 50% digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); analogWrite(ENA, 128); delay(3000);
}
Trong thực tế,
Có, nhưng cần dừng một khoảng rất ngắn (vài ms) để tránh dòng khởi động đột biến. Nếu dùng cầu H, có thể set IN1=IN2=HIGH (brake) trước khi chuyển sang chiều ngược.
Tại sao mạch cầu H của tôi bị nóng khi motor chạy?
Nguyên nhân thường là do điện trở dẫn (Rds_on của MOSFET) quá cao, dòng lớn hơn định mức, hoặc thiếu diode flyback. Kiểm tra lại tính toán dòng và thêm tản nhiệt.
Đảo chiều motor DC có cần tốc độ PWM không?
Không bắt buộc. Bạn chỉ cần đảo chiều và chạy full speed. Tuy nhiên PWM giúp kiểm soát tốc độ, giảm tiếng ồn và tiết kiệm năng lượng.
Làm sao để đảo chiều motor DC từ xa bằng điện thoại?
Kết hợp mô-đun Bluetooth HC-05 với Arduino và mạch cầu H. Viết app đơn giản trên MIT App Inventor để gửi lệnh đảo chiều.
Kết luận
Cách đảo chiều motor DC có nhiều giải pháp, từ cơ học đến điện tử. Lựa chọn phương pháp phù hợp phụ thuộc vào điện áp, dòng điện, yêu cầu điều khiển và ngân sách. Mạch cầu H dùng IC driver như L298N là lựa chọn cân bằng nhất cho người mới. Đối với ứng dụng công nghiệp hoặc dòng lớn, cầu H MOSFET hoặc relay DPDT với mạch bảo vệ đầy đủ sẽ đảm bảo độ tin cậy. Nắm vững nguyên lý và các lưu ý về bảo vệ an toàn sẽ giúp bạn thiết kế thành công mạch đảo chiều motor DC cho bất kỳ dự án nào.





