Động cơ bước (stepper motor) là thiết bị không thể thiếu trong các hệ thống tự động hóa, máy CNC, máy in 3D và robot. Khi gặp sự cố, việc nắm vững cách xử lý lỗi stepper motor sẽ giúp bạn tiết kiệm thời gian, chi phí và đảm bảo hệ thống vận hành ổn định. Bài viết này tổng hợp đầy đủ các dạng lỗi phổ biến, nguyên nhân gốc rễ và quy trình khắc phục chi tiết dựa trên kinh nghiệm thực tế 15 năm trong lĩnh vực điều khiển chuyển động.
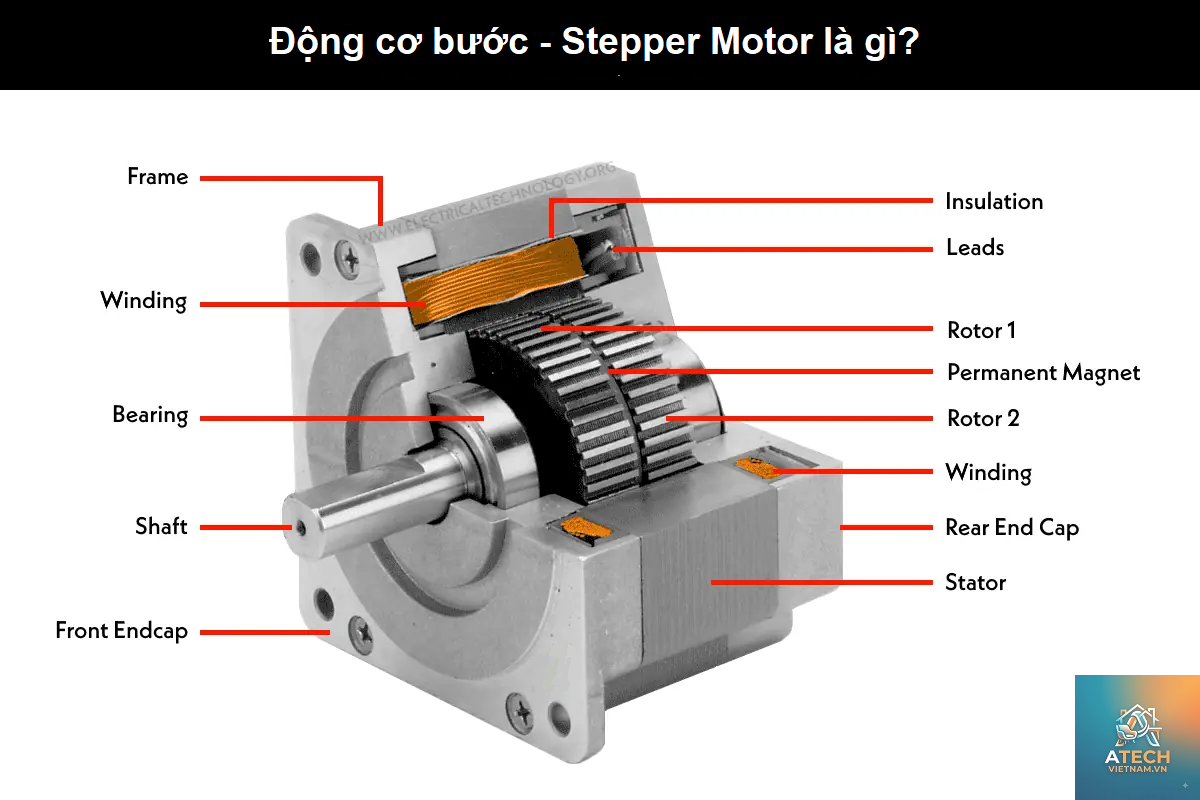
Stepper motor là loại động cơ đồng bộ hoạt động dựa trên nguyên lý chuyển đổi các xung điện thành các bước quay cơ học. Mỗi xung kích thích sẽ khiến rotor quay một góc nhất định, thường từ 0,9° đến 1,8°. Nhờ cấu tạo đặc biệt với nhiều cặp cực từ trên stator và rotor, động cơ bước có khả năng duy trì vị trí mà không cần cảm biến hồi tiếp.
Hệ thống stepper motor tiêu chuẩn bao gồm ba thành phần chính: driver (bộ điều khiển), động cơ và nguồn cấp. Driver nhận tín hiệu xung từ bộ điều khiển trung tâm (PLC, Arduino, Mach3) và chuyển thành dòng điện tuần tự kích từ các cuộn dây. Chỉ một sai lệch nhỏ trong bất kỳ khâu nào cũng dẫn đến lỗi hoạt động.
Lỗi stepper motor có thể phân thành năm nhóm chính dựa trên biểu hiện thực tế.
1. Lỗi Rung Động Và Tiếng Ồn Bất Thường
Động cơ rung mạnh khi chạy hoặc phát ra âm thanh ken két, ù ù. Nguyên nhân thường đến từ tần số xung không phù hợp với dải cộng hưởng của động cơ (thường ở vùng tốc độ thấp dưới 200 vòng/phút). Ngoài ra, dòng điện driver cài đặt quá cao hoặc điện áp nguồn không ổn định cũng gây rung lắc cơ học.
2. Mất Bước (Missing Steps)
Đây là lỗi nghiêm trọng nhất khiến vị trí thực tế lệch so với vị trí lập trình. Biểu hiện rõ rệt nhất khi chạy các đường chạy dài trong máy CNC hoặc in 3D. Nguyên nhân chính là moment tải vượt quá khả năng kéo của động cơ, tần số xung quá cao khiến driver không kịp phản hồi, hoặc nhiễu điện từ từ các thiết bị cao tần xung quanh.
3. Quá Nhiệt (Overheating)
Nhiệt độ vỏ động cơ vượt quá 85°C làm hỏng men dây và giảm tuổi thọ. Nguyên nhân phổ biến gồm dòng điện driver cài đặt cao hơn định mức, động cơ hoạt động ở chế độ giữ (hold) quá lâu, hoặc hệ thống tản nhiệt kém. Động cơ stepper thông thường có thể chịu nhiệt đến 100°C, nhưng vận hành liên tục ở nhiệt độ cao sẽ khiến từ trường suy giảm vĩnh viễn.
4. Không Chạy Hoặc Chạy Không Đều
Động cơ đứng im hoặc giật cục dù đã cấp tín hiệu. Kiểm tra nhanh bằng cách chạm tay vào trục: nếu trục bị kẹt cơ học hoặc driver báo lỗi. Nguyên nhân điện tử có thể bao gồm đứt dây kết nối, chết một pha trong driver, hoặc xung điều khiển không đúng logic (TTL hay CMOS).
5. Lỗi Cộng Hưởng
Xảy ra khi tần số xung trùng với tần số cộng hưởng tự nhiên của rotor, làm động cơ rung dữ dội và mất moment cực đại. Mỗi loại động cơ bước đều có một vài điểm cộng hưởng nguy hiểm, thường nằm trong dải 50-200 bước/giây.
Để xử lý triệt để, bạn cần thực hiện theo từng bước có logic từ ngoài vào trong, từ cơ khí đến điện tử.
Bước 1: Kiểm Tra Nguồn Điện Và Kết Nối
Sử dụng đồng hồ đo điện áp kiểm tra nguồn cấp cho driver. Stepper motor thông thường yêu cầu điện áp DC từ 12V đến 48V tùy loại. Điện áp sụt giảm quá 5% so với yêu cầu sẽ gây mất moment. Đồng thời kiểm tra các đầu cắm, giắc nối có bị oxy hóa hay lỏng lẻo không. Dây tín hiệu (PUL+, DIR+, ENA+) cần được bọc chắn riêng, cách xa dây nguồn và các thiết bị inverter ít nhất 10cm.
Thông số
Giá trị chuẩn
Ngưỡng cảnh báo
Điện áp nguồn DC
90%-105% định mức
Dưới 85% hoặc trên 110%
Dòng điện driver
Bằng 80% dòng định mức động cơ
Vượt quá 100% gây quá nhiệt
Điện trở cuộn dây
Sai lệch ±5% giữa các pha
Chênh lệch trên 10% báo hỏng cuộn
Bước 2: Cài Đặt Lại Thông Số Driver
Driver là linh hồn của hệ thống stepper. Cần kiểm tra ba tham số chính:
Dòng điện đầu ra (Current): cài đặt ở mức 80%-90% dòng định mức của động cơ. Ví dụ động cơ 2.0A nên đặt driver ở 1.6A-1.8A.
Phân giải vi bước (Microstep): với máy CNC chọn 1/8 hoặc 1/16 để cân bằng giữa độ mịn và moment. Với in 3D thường dùng 1/16 đến 1/32.
Thời gian giảm dòng giữ (Hold current): nên đặt 50% dòng định mức, giảm nhiệt khi động cơ đứng yên.
Bước 3: Tối Ưu Tần Số Xung Và Gia Tốc
Mất bước thường xảy ra khi driver nhận tần số xung quá cao đột ngột. Nguyên tắc là tăng tốc và giảm tốc theo đường cong S-curve. Trong firmware Marlin của máy in 3D,
Tiếng kêu thường là do dòng điện driver chạy ở chế độ Điều chế độ rộng xung (PWM) tần số thấp. Nâng tần số PWM trong driver lên 30kHz-50kHz sẽ giảm tiếng ồn đáng kể. Nếu không có tùy chọn, chuyển sang chế độ vi bước cao hơn (ví dụ từ 1/8 lên 1/16).
Làm sao biết động cơ bước bị mất bước hay hỏng driver?
Cách nhanh nhất: đánh dấu vị trí trục, chạy 1000 bước theo một chiều, sau đó chạy ngược lại 1000 bước. Nếu lệch vị trí ban đầu lớn hơn 2% là mất bước. Nếu động cơ đứng im hoàn toàn dù driver báo chạy, driver đã hỏng pha hoặc chết IC.
Nhiệt độ lên tới 90°C có nguy hiểm không?
Động cơ stepper loại thường chịu được đến 100°C (nhiệt độ vỏ). Tuy nhiên, nếu vượt 85°C trong thời gian dài trên 30 phút, men dây sẽ bị lão hóa nhanh. Giải pháp: giảm dòng hold xuống 40%, gắn quạt làm mát, hoặc dùng động cơ có cấp chịu nhiệt cao hơn (Class H).
Động cơ quay một chiều mà không quay ngược được?
Kiểm tra tín hiệu DIR (Direction). Nếu tín hiệu DIR bị rơi ở mức thấp cố định do lỗi chân cắm hoặc chương trình điều khiển xuất sai, động cơ chỉ quay một chiều. Dùng oscilloscope hoặc logic analyzer kiểm tra mức logic trên chân DIR trong lúc đảo chiều.
Nên dùng nguồn switching hay nguồn tuyến tính cho stepper motor?
Nguồn switching (biến áp xung) tiết kiệm điện, nhỏ gọn nhưng sinh nhiễu tần số cao dễ gây mất bước ở khoảng cách dây dài. Nguồn tuyến tính (biến áp sắt từ) cho dòng sạch hơn, thích hợp cho các hệ thống yêu cầu độ chính xác cao. Khuyến nghị dùng nguồn switching có lọc EMI và tụ trung tần.
Kết Luận
Việc nắm vững cách xử lý lỗi stepper motor không chỉ giúp khắc phục sự cố nhanh chóng mà còn tối ưu hiệu suất và kéo dài tuổi thọ thiết bị. Luôn bắt đầu từ kiểm tra nguồn và kết nối, kế đến cài đúng thông số driver, cuối cùng là xử lý cơ khí và tải. Ghi nhớ các nguyên nhân cốt lõi: dòng quá cao, tần số không phù hợp, nhiễu điện từ và quá tải cơ học. Khi áp dụng đúng quy trình trên, hơn 90% lỗi stepper motor có thể được khắc phục tại chỗ mà không cần thay thế linh kiện tốn kém. Hãy ghi chép lại từng lỗi gặp phải và cách xử lý để xây dựng kho kinh nghiệm riêng cho bạn.